Identifying The Problem
Our objective is to design a robot that will be able to compete in Vex’s “Nothing But Net” Game, in Regional, Provincial, and World competition levels. Our plan is to design an “all-round”, multipurpose robot that we have great confidence in and has the capability and reliability to shoot NBN Balls, and to lift another robot via a sturdy robot chassis and a strong design.
As a team, we are hoping to design and build a robot that is capable of winning multiple competitions such as Regionals, Provincials, and Worlds. Through past years, we've gained multitudes of information and assistance that we intend to apply to our team as we move on throughout the season. Furthermore, we personally have a passion for engineering and are thankful that we have the opportunity to work with Vex Robotics and Vex Competitions.
As a team, we are hoping to design and build a robot that is capable of winning multiple competitions such as Regionals, Provincials, and Worlds. Through past years, we've gained multitudes of information and assistance that we intend to apply to our team as we move on throughout the season. Furthermore, we personally have a passion for engineering and are thankful that we have the opportunity to work with Vex Robotics and Vex Competitions.
The Research
Within the research stage, the team visited a number of websites, which include, but are not limited to; YouTube, VexForums, other vex teams websites and Google. With this gathered research, we will be able to make more informed decisions what is built and how.
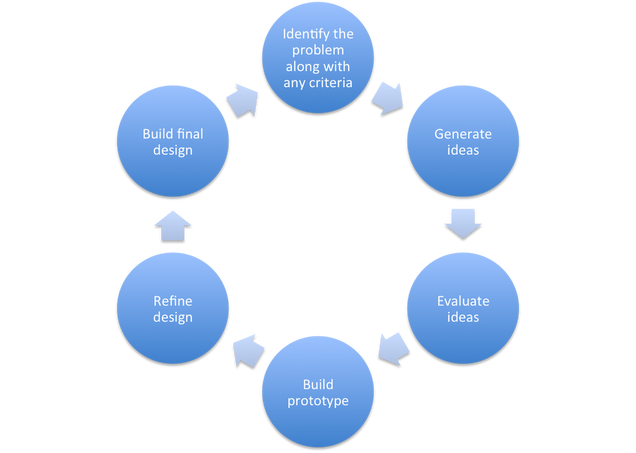
Generate and Evaluate Ideas
With the research collected (Stage 3), we determined that there were two viable and logical options.
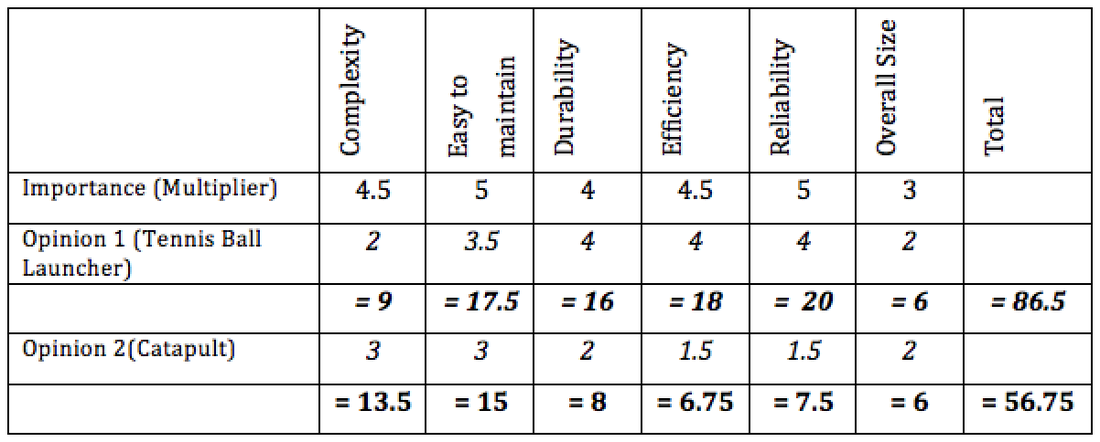
With multiple opinions to choose from, a “Design Matrix” was created. With the use of the matrix, we can find the best opinion that will suit us. How does it work?
- A “Tennis Ball” Launcher: includes motors that are connected to spinning flywheels, which would use friction and compression to launch a ball.
- A Catapult: includes the use of a long arm with a releasable and re-settable weight on one end, and a contraption to hold the game balls on the opposite end. Using a motor, the weight would be raised to a specified height, and then released, causing the ball to rapidly accelerate and become airborne.
With multiple opinions to choose from, a “Design Matrix” was created. With the use of the matrix, we can find the best opinion that will suit us. How does it work?
- In the column header, we list any factors that we would need to consider (Complexity, Durability, etc.)
- List the importance of each with factors ranging from a value of 1-5. (A 5 being extremely important and 0 being mostly insignificant.
- List the design opinions on the left side of the chart, and rate them in each of the factors. (Five is overall positive and a zero overall negative.)
- Multiply the importance by the rating of each column, and then add the values all together
- Total the values of the row together. The one with the greatest number, is your best opinion, thus being Opinion 1 (Tennis Ball Launcher)
Research On Final Design
- With a design such as the tennis ball launcher, we had to be innovative and logical on how we were going to load and transport the game objects. What we believed would work and backed up with research, is a two-stage intake (rollers & vertical conveyer belt) where the objects can be brought it, stored, and loaded into the launcher at command.
- With additional research collected, we found that a larger flywheel would provide a greater firing range (due to increased velocity at greatest diameter), along with a lesser RPM needed to shoot a ball.
- Furthermore, we calculated a target velocity * that the flywheel (in RPMs) would need to spin in order to travel a specified distance ***.
Rpm Of Wheel
𝑉 = (𝐶𝑖𝑟𝑐𝑢𝑚𝑓𝑒𝑟𝑒𝑛𝑐𝑒)(𝑟𝑝𝑠)
9.5820 𝑚/𝑠 = (0.319186𝑚)(𝑟𝑝𝑠)
𝑟𝑝𝑠= (30.02011858)(60)
𝑟𝑝𝑚 = 1801.207115
**The Circumference used in above calculations are based on the Vex 4.0” Wheel
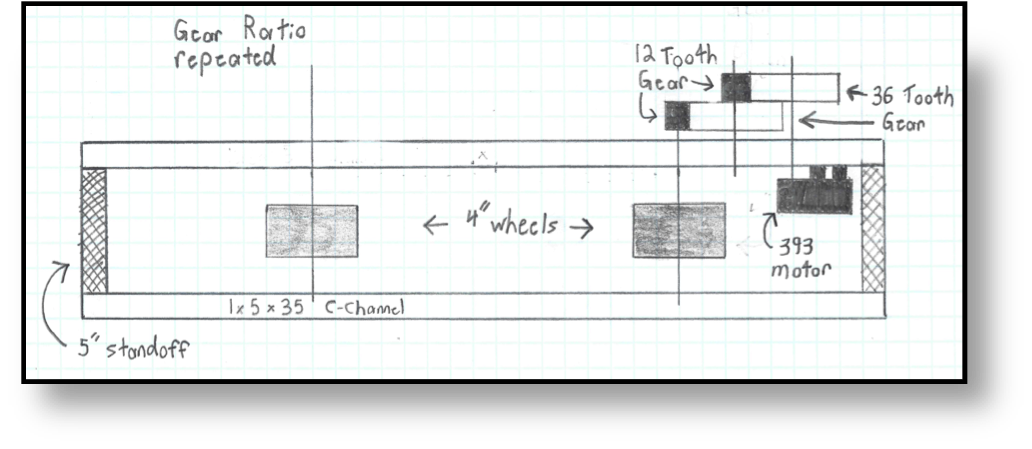
Prototype 1 & Evaluation
- As a team we wanted to focus a great deal of time in the prototyping stage. We wanted to make sure that the design we would ultimately choose, would work when implemented as a part of the robot. What we found in the making of the prototype is that gear ratio is extremely important. Too small of a gear ratio would result in an insignificant rpm to launch the ball. Too great of a gear ratio, would decrease the torque of the motor, and stall the motors when load was applied. In addition to the gear ratios, we remembered that friction was going to be working against us, yet simultaneously, helping us. To explain, an optimal amount of friction must be applied to launch the ball, yet not in excess. Thus we must build a launcher that would perfect the total friction.
After repetitive and continuous testing of the prototype, we concluded that the current design would not work. We managed to narrow the problem down to the amount of friction on the axle connecting the motor to the gears. With the amount friction being applied to the axle, it often led to the motor overheating and tripping the PTC (internal breaker) resulting in a “dead” robot.
Due to the reliability issues of the prototype, it was obvious that more work was needed along with a redesigned launcher.
Although the prototype didn’t work as hoped, as a team we thought that with changes that reduced the amount of friction, we would be able to correct the problems and continue to use a launcher of a similar design.
