Wiring schematic
Wiring of Robot
All motor wires are tied down to the robot with white zip straps; any motors that are used for the lift are tied down with red zip straps, and all sensors use black zip straps. This "colour" method is utilized so that troubleshooting with motors or sensors is made easier by identifying the wiring in use.
Motor Efficiency (Calculations & Findings)
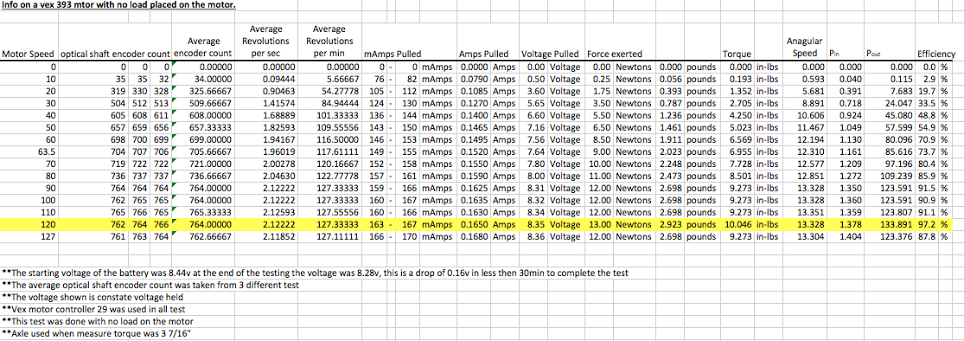
(Above is the 393 Motor tests and the efficiency calculations. The most efficient Motor speed input observed is 120. [IN YELLOW]).
393 Motor Testing Graphs
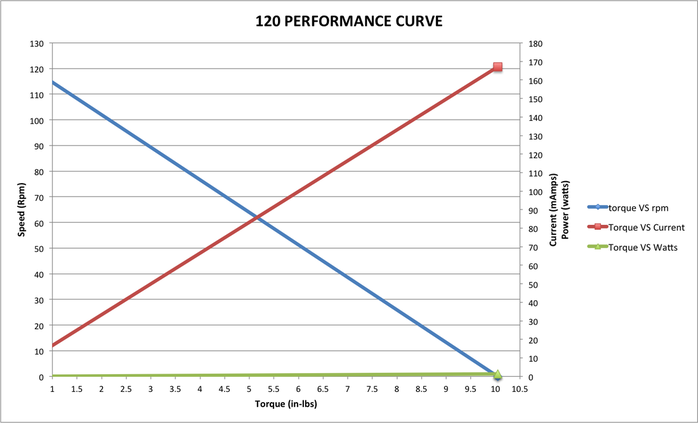
393 Motor Performance Research Findings
We as a team did this testing to better understand the operation of the Vex 393 motor under different conditions. Over the testing period we found that the info given online when buying the motor may not always be correct. The current draw along with the rpm is all misleading for the info that is given online. One of the most helpful parts of the research was finding the peak efficiency of the motor. We found that this are was around the programming value of 120. This given the highest rpm along with torque in conjunction with the lowest current draw (amps) of that range.
Misc. Notes
We conducted motor testing along with research on the motors and motor types. We have found that a 393 motor has a stall torque of 14.76in/lb whereas a 393 motor with high-speed gears has a stall torque of 9.3in/lb. Therefore, we try to limit the use of these motors as they do not provide the adequate desired torque needed. Although these motors will still produce torque, we have discovered via "trial and error" that this may also cause damage to the motor.
-The Vex cortex also has two circuit breakers built in. (port 1-5, and port 6-10). Each of these breakers has a rating of up to four amps.
-A 393 motor has a stalling current of 3.6A (The motor will stop working if it is overworked causing it to draw a current higher than 3.6A.)
-The 393 motor has a current limiter built in to it, causing the motor to trip if it draws a continuously current of 1.8a for around seven seconds.
What does this mean to us?: If all the motors that are put on the circuit breakers have a draw current that is higher then 4.0A, then the breaker will trip. Thus, we need to keep this in mind when wiring the motors so that the entire load is not put onto a single circuit breaker.
-The Vex cortex also has two circuit breakers built in. (port 1-5, and port 6-10). Each of these breakers has a rating of up to four amps.
-A 393 motor has a stalling current of 3.6A (The motor will stop working if it is overworked causing it to draw a current higher than 3.6A.)
-The 393 motor has a current limiter built in to it, causing the motor to trip if it draws a continuously current of 1.8a for around seven seconds.
What does this mean to us?: If all the motors that are put on the circuit breakers have a draw current that is higher then 4.0A, then the breaker will trip. Thus, we need to keep this in mind when wiring the motors so that the entire load is not put onto a single circuit breaker.
